
基于YOLOv5的智能车流量统计系统设计与实现(源码+定制+开发)车辆实时检测与流量统计系统开发、基于深度学习的交通流量监测平台设计 、车流量实时监测与统计系统开发、智能交通流量统计平台设计与实现
博主介绍:✌我是阿龙,一名专注于Java技术领域的程序员,全网拥有10W+粉丝。作为CSDN特邀作者、博客专家、新星计划导师,我在计算机毕业设计开发方面积累了丰富的经验。同时,我也是掘金、华为云、阿里云、InfoQ等平台的优质作者。通过长期分享和实战指导,我致力于帮助更多学生完成毕业项目和技术提升。技术范围:我熟悉的技术领域涵盖SpringBoot、Vue、SSM、HLMT、Jsp、PHP、Nod
博主介绍:
✌我是阿龙,一名专注于Java技术领域的程序员,全网拥有10W+粉丝。作为CSDN特邀作者、博客专家、新星计划导师,我在计算机毕业设计开发方面积累了丰富的经验。同时,我也是掘金、华为云、阿里云、InfoQ等平台的优质作者。通过长期分享和实战指导,我致力于帮助更多学生完成毕业项目和技术提升。技术范围:
我熟悉的技术领域涵盖SpringBoot、Vue、SSM、HLMT、Jsp、PHP、Nodejs、Python、爬虫、数据可视化、小程序、安卓app、大数据、物联网、机器学习等方面的设计与开发。如果你有任何技术难题,我都乐意与你分享解决方案。为什么选择阅读我:
我是程序阿龙,专注于软件开发,拥有丰富的编程能力和实战经验。在过去的几年里,我辅导了上千名学生,帮助他们顺利完成毕业项目,同时我的技术分享也吸引了超过50W+的粉丝。我是CSDN特邀作者、博客专家、新星计划导师,并在Java领域内获得了多项荣誉,如博客之星。我的作品也被掘金、华为云、阿里云、InfoQ等多个平台推荐,成为各大平台的优质作者。
🍅获取源码请在文末联系我🍅

目录:
一、详细操作演示视频
在文章的尾声,您会发现一张电子名片👤,欢迎通过名片上的联系方式与我取得联系,以获取更多关于项目演示的详尽视频内容。视频将帮助您全面理解项目的关键点和操作流程。期待与您的进一步交流!

项目背景与意义
随着城市化进程的不断加速以及交通工具的日益普及,车辆数量的迅猛增长给城市交通管理带来了前所未有的挑战。车流量检测作为交通管理的重要组成部分,不仅能够提供实时的交通状况信息,还能为交通管理部门制定科学合理的交通策略提供支持。通过优化交通流量管理,车流量检测可以有效提高道路利用效率,缓解交通拥堵,并降低交通事故的发生率,因而具有重要的现实意义。
传统的车流量检测方法主要依赖于物理传感器设备,例如地磁传感器和红外线传感器等。然而,这些方法存在成本高、安装复杂以及维护困难等问题,限制了其大规模应用的可能性。相比之下,基于计算机视觉的车流量检测系统通过分析道路摄像头采集的图像实现检测,具有显著优势,包括成本低、安装便捷、实时性强等。这种方式为交通管理提供了一种更高效、更经济的解决方案。
在技术实现上,OpenCV作为一个功能强大的开源计算机视觉库,提供了丰富的图像处理和视觉算法资源,可用于车流量检测系统中的图像分析与处理。而Yolov5作为一种基于深度学习的目标检测算法,以高精度和强实时性著称,为车辆的精准检测与跟踪提供了可靠的技术支持。二者的结合能够为车流量检测系统的构建提供技术保障,推动交通管理方式的智能化与现代化。
系统流程步骤
基于OpenCV和Yolov5的车流量检测系统实现步骤
基于OpenCV和Yolov5的车流量检测系统通过多个关键步骤实现,其整体流程设计科学高效,能够满足实时交通检测的需求。以下是具体实现步骤:
-
图像采集
使用道路监控摄像头实时采集车辆通行的图像或视频数据,确保图像采集的稳定性和连续性。采集的数据作为后续处理的基础输入。 -
图像预处理
利用OpenCV对采集到的图像数据进行预处理,提升图像质量,为后续的检测与分析提供可靠的基础。预处理主要包括以下操作:- 去噪:通过滤波技术(如高斯滤波、中值滤波等)减少图像中的噪声干扰。
- 图像增强:调整图像对比度和亮度,突出车辆特征,提高检测算法的精度。
-
车辆检测
使用Yolov5深度学习目标检测算法,对预处理后的图像进行车辆检测。Yolov5通过训练好的模型,可以准确识别图像中的车辆位置,并标注出车辆的边界框和类别。该步骤的关键在于模型的训练与优化,以保证其在各种环境(如光照变化、天气条件)下的鲁棒性。 -
车辆跟踪
基于OpenCV对已检测到的车辆进行多帧连续跟踪,确保能够捕获车辆在视频流中的运动轨迹。常用的跟踪算法包括光流法、卡尔曼滤波以及多目标跟踪算法等。跟踪过程需结合车辆检测结果,实现车辆的唯一性标识,避免多目标混淆。 -
车流量统计
根据车辆跟踪结果统计道路上的车流量信息,具体包括:- 车辆数量:在指定时间段内统计通过监控区域的车辆总数。
- 车辆速度:利用车辆在不同帧间的位移和时间间隔计算车辆速度。
- 其他统计信息:如车辆类型分布、车道利用率等,进一步支持交通管理决策。
通过上述步骤,基于OpenCV和Yolov5的车流量检测系统能够实现对道路交通状况的全面监测,为交通管理优化提供有力的数据支撑。
算法优点
基于OpenCV和Yolov5的车流量检测系统具有以下显著优势和实际意义:
-
高准确率
Yolov5作为当前目标检测领域中领先的算法之一,凭借其深度学习的优势,在车辆识别和定位任务中展现出较高的检测准确率。即使在复杂交通环境(如光照变化、拥挤路段等)下,系统仍能稳定检测出道路上的车辆。 -
实时性强
Yolov5的轻量化模型和高效推理能力使其具有良好的实时性能。结合OpenCV的优化处理,系统能够快速完成车辆检测和跟踪,实现车流量的实时更新,为交通管理部门提供动态的交通状况信息。 -
成本低
与传统依赖物理传感器(如地磁传感器、红外传感器)的检测方法相比,该系统仅需使用常规监控摄像头,配合计算机视觉技术即可实现车流量监测,从而大幅降低硬件设备和维护的成本。 -
安装方便
系统的实施只需在道路关键位置布设摄像头,无需对路面进行大规模改造。后续的维护与扩展也较为便捷,适合广泛推广和部署。 -
实用性强
车流量检测系统能够为交通管理部门提供实时、精准的交通数据支持,有助于:- 制定科学合理的交通优化方案。
- 提高道路资源利用效率,缓解交通拥堵问题。
- 提升交通安全性,减少交通事故的发生。
数据集的制作
在车流量统计中只需要识别道路中的车辆,因此在制作数据集时只选取车辆一种类别,其他非车辆物体作为负样本,包含车辆的正样本有8000个,负样本包含行人、飞机、船等共3000个。 车辆识别数据集制作首先运用图像标注软件对车辆进行标注,并将所标注的信息生成相对应的xml文件,xml文件包含图片名称、图片路径、目标标签名称及目标位置坐标,车辆标注过程如图3.18所示。包含标注信息的xml文件不能直接用来训练YOLO网络,需要将xml文件转换成YOLO支持的txt文件。标注完所有图片后,将原图及生成的所有文件按照VOC数据文件结构存放,以供训练车辆识别模型使用。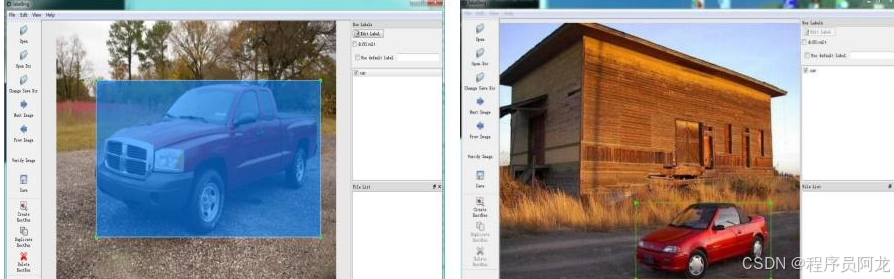

系统实现界面:




核心代码实现:
class Detector:
def __init__(self):
self.img_size = 640
self.threshold = 0.1
self.stride = 1
self.weights = './weights/Attention_mechanism.pt'
self.device = '0' if torch.cuda.is_available() else 'cpu'
self.device = select_device(self.device)
model = attempt_load(self.weights, map_location=self.device)
model.to(self.device).eval()
model.half()
self.m = model
self.names = model.module.names if hasattr(model, 'module') else model.names
def preprocess(self, img):
img0 = img.copy()
img = letterbox(img, new_shape=self.img_size)[0]
img = img[:, :, ::-1].transpose(2, 0, 1)
img = np.ascontiguousarray(img)
img = torch.from_numpy(img).to(self.device)
img = img.half()
img /= 255.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
return img0, img
def detect(self, im):
im0, img = self.preprocess(im)
pred = self.m(img, augment=False)[0]
pred = pred.float()
pred = non_max_suppression(pred, self.threshold, 0.4)
boxes = []
for det in pred:
if det is not None and len(det):
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
for *x, conf, cls_id in det:
lbl = self.names[int(cls_id)]
if lbl not in ['bicycle','car', 'bus', 'truck']:
continue
x1, y1 = int(x[0]), int(x[1])
x2, y2 = int(x[2]), int(x[3])
xm = x2
ym = y2
if ym +0.797* xm -509.77 > 0:
boxes.append((x1, y1, x2, y2, lbl, conf))
return boxes检测核心代码:
import cv2
class MouseClick:
def __init__(self, img):
self.img = img
def on_EVENT_LBUTTONDOWN(self, event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
print("(%d,%d)" % (x, y))
xy = "%d,%d" % (x, y)
cv2.circle(self.img, (x, y), 1, (255, 0, 0), thickness=-1)
cv2.putText(self.img, xy, (x, y), cv2.FONT_HERSHEY_PLAIN,
1.0, (0, 0, 0), thickness=1)
cv2.imshow("image", self.img)
def mouse(self):
cv2.namedWindow("image")
cv2.setMouseCallback("image", self.on_EVENT_LBUTTONDOWN)
cv2.imshow("image", self.img)
while (True):
try:
cv2.waitKey(100)
except Exception:
cv2.destroyAllWindows()
break
cv2.waitKey(0)
cv2.destroyAllWindows()为什么选择我
我是程序阿龙,专注于软件开发,拥有丰富的编程能力和实战经验。在过去的几年里,我辅导了上千名学生,帮助他们顺利完成毕业项目,同时我的技术分享也吸引了超过50W+的粉丝。我是CSDN特邀作者、博客专家、新星计划导师,并在Java领域内获得了多项荣誉,如博客之星。我的作品也被掘金、华为云、阿里云、InfoQ等多个平台推荐,成为各大平台的优质作者。

汇聚全球AI编程工具,助力开发者即刻编程。
更多推荐
 12
12 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)