
具身智能企业的最大威胁,OpenClaw只是开了个头……
当技术门槛被拉平,护城河便不再是护城河
——危机与机遇,恰在同一侧
目录
03 RoboClaw 论文的启示——从工具到全生命周期框架
尽管 “龙虾热” 已持续一段时间,但作为打通 AI 认知与物理执行的关键中间件,OpenClaw的出现并非偶然,其技术本质与其在具身智能领域的影响仍值得深度审视——
OpenClaw 究竟为这个行业带来了什么,它是否正在重新定义机器人的进化路径?
因此,本文将从三个层面展开分析:
首先,探讨 OpenClaw 如何以较低的接入门槛,在语言模型的理解能力与物理实体的执行能力之间建立连接;
其次,解析 RoboClaw 如何将机器人从单一任务执行工具拓展为具备感知、记忆、规划与自我优化能力的完整智能体;
最后,通过对比通用大模型与具身大模型的技术路径,分析 OpenClaw 类方案对当前具身智能企业可能产生的结构性影响。
共同探讨:当热潮退去,OpenClaw 留下的究竟是一段技术插曲,还是行业演进的基础设施?
01 从"赛博养虾"到"物理外挂"
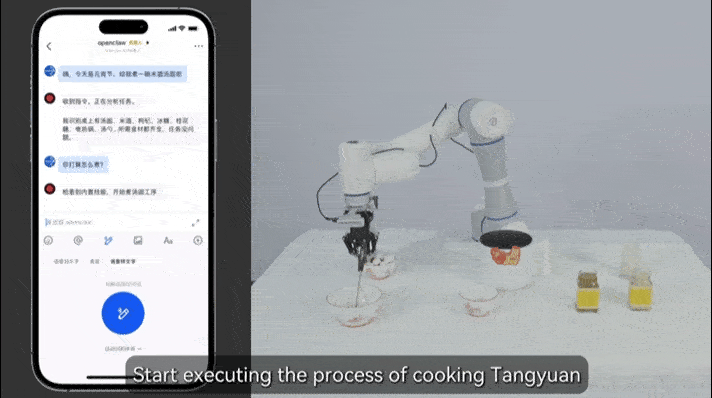
如果你最近经常刷社交媒体,一定刷到过这样的视频:

▲机械臂通过和人类对话的方式自主完成煮汤圆的任务,期间可以实现和人类的实时交互
一个普通的机械臂,接上电脑摄像头后,工作人员对它说:
"今天是元宵节,给我煮点甜酒汤圆。"
机械臂稍微停顿了一下,便开始有条不紊地倒水、下汤圆、等水开。
中途工作人员问:
"能加点糖吗?"它甚至会反问:"红糖还是桂花糖?"
得到回答后,精准地抓起红糖倒进锅里。
这场“龙虾热”的热潮背后,有一个关键的时代背景:
2025 年以来,以 MCP(Model Context Protocol)为代表的 AI Agent 协议标准化进程大幅提速,各类多模态大模型的视觉理解能力也突飞猛进。
OpenClaw 恰好踩在了这个时间节点上,以一种极低的接入门槛,把"大模型的理解力"和"机器人的执行力"之间的鸿沟,临时搭了一座桥。
02 深度解析:OpenClaw 到底给机器人带来了什么?
在机器人的世界里,要完成一个任务,系统通常分为四个层次:
-
大脑(决策层)负责理解目标,把大任务拆解成小任务;
-
感知层负责认出环境里的东西,知道它们在哪;
-
行为组织层负责把小任务变成具体的技能序列;
-
小脑(控制层)则负责轨迹规划、伺服控制、避障,确保动作安全执行。
在过去,这四个层次往往是割裂的"孤岛"——
就好比你为了喝一杯咖啡,不仅要自己种咖啡豆,还要自己造咖啡机。
每个场景、每种物体、每种指令,都需要单独适配,开发周期动辄数月,成本极高。
OpenClaw 的出现,并不是让机器人突然"长出"了运动能力,而是充当了一个极其聪明的"数字化 PM(项目经理)"或"上层调度系统"。
它巧妙地利用了现有多模态大模型(如 GPT-4o、Claude 3.5 Sonnet)强大的理解能力,将人类模糊的自然语言指令,翻译成底层机器人可以执行的模块化技能(Skills)。
整个系统的核心架构遵循"技能(Skills)→ 工具(Tools)→ 策略(Policies)":
-
底层的 Policies 是具体的 VLA 动作模型;
-
Tools 是可调用的系统接口(如启动策略、获取环境摘要);
-
Skills 则是由 Agent 编排的复合流程。
举个例子,当你对机器人说"把红色的积木放到盒子里"时,OpenClaw 会这样工作:
-
首先调用多模态大模型,通过摄像头"看"到红色积木和盒子;
-
然后把任务拆解为"寻找红色积木 → 移动机械臂 → 抓取 → 移动到盒子上方 → 松开";
-
最后调用底层控制系统已经写好的"移动"、"抓取"、"松开"等代码接口(API)。
▲图2|机器人在龙虾🦞的指挥下采集数据
发现了吗?OpenClaw 并没有教机器人"怎么抓",它只是告诉机器人"去抓什么"。
机器人的动作能否平稳、抓取角度对不对、会不会把东西捏碎,依然取决于底层的小脑和控制算法。
但即便如此,它的行业影响可以说是颠覆性的。
-
其一,极大降低了开发门槛和试错成本。
过去需要几个月专项开发的视觉识别和任务编排能力,现在直接被通用大模型解决了。感知、规划、控制模块变成了即插即用的能力单元,一个有基础编程能力的工程师,周末就能搭出一个能"听懂话"的机器人原型。
-
其二,赋予了机器人初步的"物理世界连续记忆"。
传统的机器人往往是"活在当下"的,干完活就忘了。而 OpenClaw 能够将机器人感知到的"地点、物体、事件、时间"组织成可检索的记忆结构。
这意味着,当机器人再次进入同一个房间时,它能"想起"你昨天把钥匙放在了哪里,或者上次执行某个任务时在哪个步骤失败了。
03 RoboClaw 论文的启示——从工具到全生命周期框架
如果说网友们的"赛博养虾"还停留在极客的玩具阶段,那么学术界和产业界的严肃探索,则向我们展示了这种 Agentic(智能体化)架构的终极形态。
最近,一项名为 RoboClaw 的研究成果引起了广泛关注。
来自 Agibot 的研究团队基于 Agibot G01 双臂移动机器人平台,将 OpenClaw 的核心思想推向了更深的高度。
RoboClaw 并没有把 Agent 仅仅当作一个聊天外挂,而是构建了一个贯穿机器人全生命周期的统一框架。
在这个框架中,数据收集、策略学习和任务执行,都在同一个 VLM(视觉语言模型)驱动的控制循环下进行。
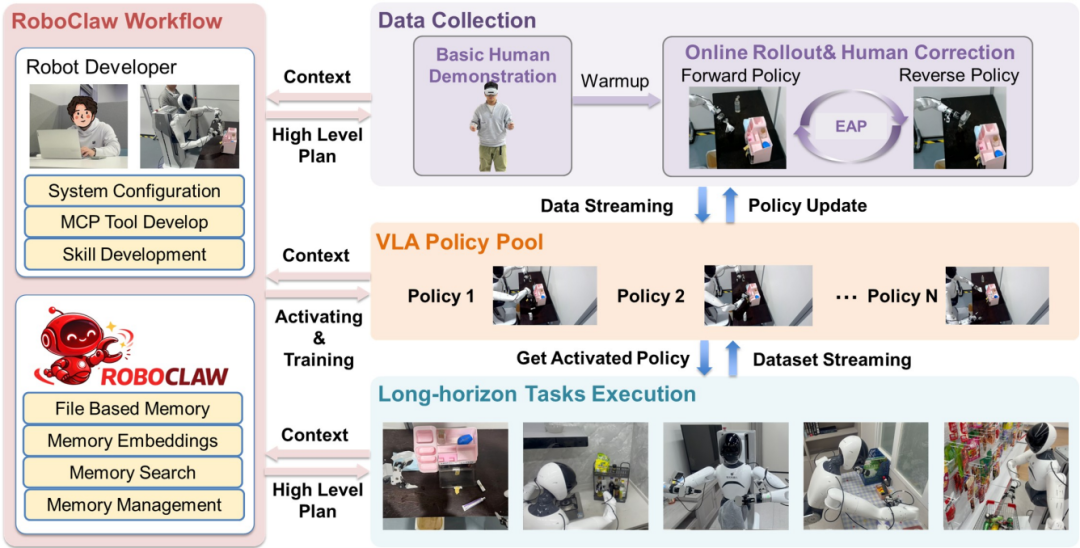
▲图3 | RoboClaw 机器人策略全生命周期工作流。
开发者负责配置系统参数、MCP 工具与技能(Skills),RoboClaw 则提供基于文件的持久化记忆、记忆向量嵌入、语义检索与记忆管理能力。数据收集阶段先由人类进行少量基础示教,随后切换为在线自主采集模式。最终,被激活的底层策略在高层规划与上下文语境的引导下,驱动机器人完成复杂的长程操作任务。
这解决了机器人领域一个长期以来的痛点:数据收集太费人工了。
过去,为了让机器人学会一个动作,研究人员需要反复手动摆放道具、让机器人尝试、失败后人工重置环境,费时费力。
传统流水线中,数据收集、模型学习、任务部署三个阶段往往由不同的人负责,彼此之间存在严重的"语义鸿沟"——
收集数据的人对部署场景理解不深,部署时遇到的边缘情况又无法及时反馈到训练数据里,导致系统极其脆弱。
而 RoboClaw 提出了一个极其巧妙的机制——纠缠动作对(Entangled Action Pairs, EAP)。
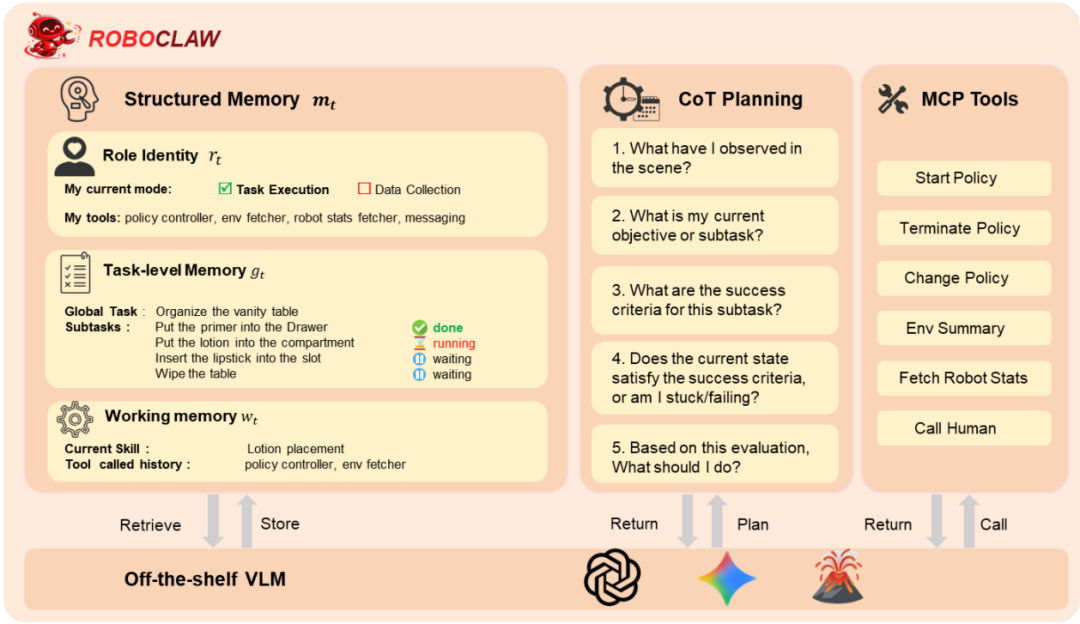
▲图4 | RoboClaw 系统架构图。
简单来说,EAP 就是给机器人的每一个正向操作(比如"拿起口红"),配对一个反向恢复动作(比如"放下口红")。
在 Agent 的调度下,机器人可以不断地"拿起—放下—拿起—放下",形成一个自我重置的闭环。
实验验证:人工时间成本降低了 53.7%
在实验中,研究团队设计了四种难度各异的操作任务:放置乳液(Body Lotion)、放置粉底液(Primer)、插入口红(Lipstick)和用纸巾擦桌(Tissue Wipe)。
其中,口红插入任务对位置精度和旋转角度要求极高,是最具挑战性的一项。通过 EAP 机制的迭代收集,这些任务的策略成功率随着数据积累持续攀升,充分验证了"自主数据飞轮"的可行性。
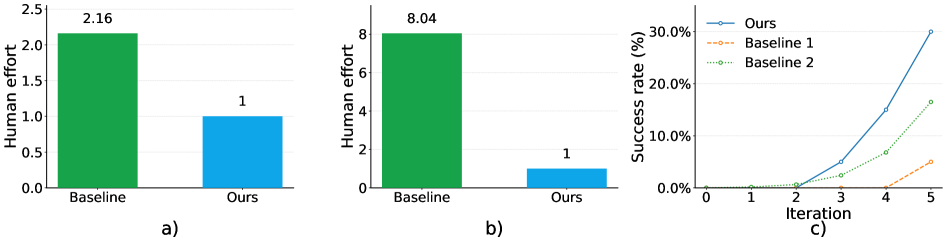
采用 RoboClaw 框架后,收集同等数量数据所需的人工时间成本降低了 53.7%(即仅需原来的 1/2.16),人工干预频率更是大幅下降至原来的 1/8.04。
实验验证:长程任务
在此外,在面对需要多步操作的长程任务(Long-Horizon Tasks)时,RoboClaw 也展现出了惊人的稳定性。
在整理梳妆台的复杂任务中,Agent 能够实时监控每一个子任务(如放置乳液、插入粉底液、擦拭桌面)的进度。一旦发现失败,它不会像传统机器人那样死机报错,而是会自主调用恢复策略重新尝试。
这使得 RoboClaw 在长程任务上的成功率比基线方法提升了整整 25%。

从 OpenClaw 到 RoboClaw
机器人的"大脑"不再是一个孤立的决策模块,而是一个能够感知、记忆、规划、执行、反思、自我进化的完整智能体。
更重要的是,部署阶段产生的轨迹数据,可以在相同的语义上下文和决策策略下,被重新纳入训练流水线,形成真正意义上的"闭环生命周期学习"。
04 通用大模型 vs 具身大模型
看到这里,一个直击灵魂的问题自然浮出水面:
既然 OpenClaw 加上通用多模态大模型(如 GPT-4o)就能搞定理解和任务编排,那各家机器人公司耗费巨资、苦苦研发的“具身大模型”还有意义吗?
是不是只要有个聪明的"大脑",配上开源的框架,谁都能做机器人?
答案是:具身大模型不仅有意义,而且是未来真正的核心壁垒。
深蓝具身智能
-
通用大模型的强大,在于它们改变了机器人"理解世界"的方式。
理解一句话、认出一个杯子、把任务拆解成几步,这些越来越像是一种通用的、可被标准化的能力。
但机器人最难的部分,从来不是"看懂"和"想明白",而是在物理世界中"做对"。
当机器人伸手去抓一个软塌塌的纸杯时,力度多大才不会捏瘪?
当目标被遮挡时,如何调整姿态?
当抓取失败时,如何根据当前的物理接触反馈进行微调?
这些涉及物理规律、接触力学、空间几何的"脏活累活",是通用大模型目前无法通过纯文本和图像解决的。
这就是为什么我们看到很多接入 OpenClaw 的机器人,虽然能听懂复杂的指令,但真到了执行抓取动作时,依然显得笨拙、缓慢,甚至经常失败。
这里有一个微妙但至关重要的分野值得关注:
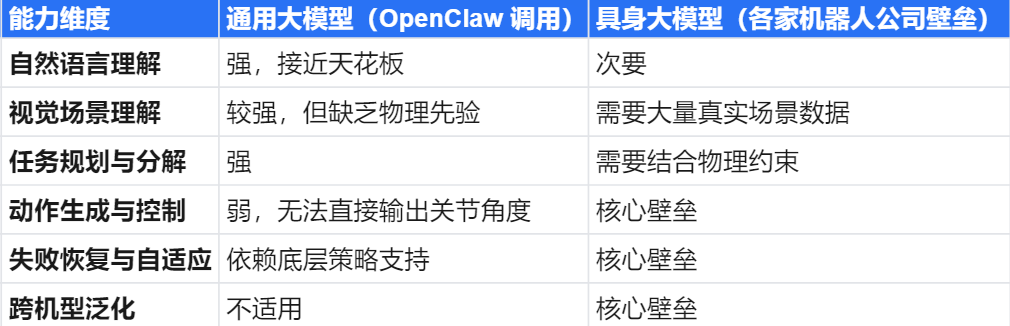
因此,OpenClaw 并没有“抹杀”机器人公司的努力,它只是把大家拉到了同一条起跑线上。
它把"理解"和"编排"的门槛降到了最低,迫使机器人公司必须把核心精力聚焦到真正决定成败的地方——
底层控制、泛化能力和物理世界的交互稳定性上。
05 总结:退潮之后,留下的是产业基础设施
OpenClaw 作为一个具体的软件产品,也许会在几个月后被更先进的框架取代,也许会因为数据隐私等问题引发争议。但它给具身智能领域留下的,绝不仅仅是一次短暂的"赛博狂欢"。
这种影响,与其说是技术突破,不如说是一次工程范式的民主化。
就像 Docker 容器化技术并没有发明新的操作系统,却彻底改变了软件部署的方式一样;就像 Transformer 架构并没有发明注意力机制,却重新定义了深度学习的工程实践一样——
OpenClaw 也许并没有创造出任何新的机器人底层能力,但它正在重新定义机器人软件的开发范式。
产品会迭代、会被超越、会过时,但这种解法或许会沉淀为产业的基础设施……
ref
1. RoboClaw: An Agentic Framework for Scalable Long-Horizon Robotic Tasks. https://arxiv.org/abs/2603.11558
2. RoboClaw 项目官网. https://roboclaw-agibot.github.io/
3."China's AI Agent Boom: OpenClaw and the Open-Source Lobster Craze". Fortune, 14 Mar 2026. https://fortune.com/2026/03/14/openclaw-china-ai-agent-boom-open-source-lobster-craze-minimax-qwen/
4. 龙虾操控机械臂煮汤圆视频:https://www.youtube.com/watch?v=JBqrfwcqnzI

汇聚全球AI编程工具,助力开发者即刻编程。
更多推荐



 8
8 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)